
















激光雷達高速數據采集系統解決方案
激光雷達數據采集卡在項目中的應用分析:
當雷達探測到目標后, 可從回波中提取有關信息,如實現對目標的距離和空間角度定位,并由其距離和角度隨時間變化的規律中得到目標位置的變化率,由此對目標實現跟蹤; 雷達的測量如果能在一維或多維上有足夠的分辨力, 則可得到目標尺寸和形狀的信息; 采用不同的極化方法,可測量目標形狀的對稱性。雷達還可測定目標的表面粗糙度及介電特性等。
1、雷達原理
目標標記:
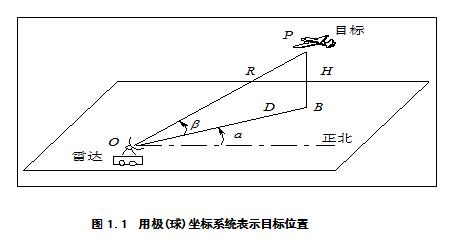
目標在空間、陸地或海面上的位置, 可以用多種坐標系來表示。在雷達應用中, 測定目標坐標常采用極(球)坐標系統, 如圖1.1所示。圖中, 空間任一目標P所在位置可用下列三個坐標確定:
1、目標的斜距R;2、方位角α;仰角β。
如需要知道目標的高度和水平距離, 那么利用圓柱坐標系統就比較方便。在這種系統中, 目標的位置由以下三個坐標來確定: 水平距離D,方位角α,高度H。
系統原理:
由雷達發射機產生的電磁能, 經收發開關后傳輸給天線, 再由天線將此電磁能定向輻射于大氣中。電磁能在大氣中以光速傳播, 如果目標恰好位于定向天線的波束內, 則它將要截取一部分電磁能。目標將被截取的電磁能向各方向散射, 其中部分散射的能量朝向雷達接收方向。雷達天線搜集到這部分散射的電磁波后, 就經傳輸線和收發開關饋給接收機。接收機將這微弱信號放大并經信號處理后即可獲取所需信息, 并將結果送至終端顯示。
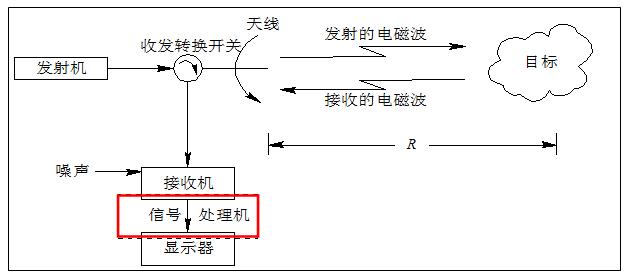
圖1.2 雷達系統原理圖
測量方法
1).目標斜距的測量
雷達工作時, 發射機經天線向空間發射一串重復周期一定的高頻脈沖。如果在電磁波傳播的途徑上有目標存在, 那么雷達就可以接收到由目標反射回來的回波。由于回波信號往返于雷達與目標之間, 它將滯后于發射脈沖一個時間tr, 如圖1.3所示。 我們知道電磁波的能量是以光速傳播的, 設目標的距離為R, 則傳播的距離等于光速乘上時間間隔, 即2R=ctr或
![]()
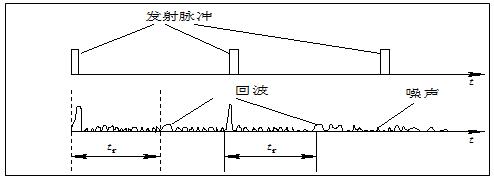
圖1.3 雷達測距
2). 目標角位置的測量
目標角位置指方位角或仰角, 在雷達測量這兩個角位置基本上都是利用天線的方向性來實現的。雷達天線將電磁能量匯集在窄波束內, 當軸時回天線波束軸對準目標時, 回波信號強, 如圖1.4實線所示。當目標偏離天線波束波信號減弱, 如圖上虛線所示。根據接收回波強時的天線波束指向, 就可確定目標的方向, 這就是角坐標測量的基本原理。天線波束指向實際上也是輻射波前的方向。
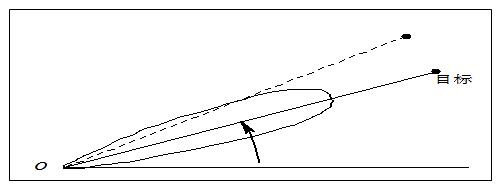
圖1.4 角坐標測量
3). 相對速度的測量
對速度時, 接有些雷達除確定目標的位置外, 還需測定運動目標的相對速度, 例如測量飛機或導彈飛行時的速度。當目標與雷達站之間存在相收到回波信號的載頻相對于發射信號的載頻產生一個頻移, 這個頻移在物理學上稱為多卜勒頻移, 它的數值為

式中, fd為多卜勒頻移,單位為Hz; vr為雷達與目標之間的徑向速度,單位為m/s; λ為載波波長,單位為m。
當目標向著雷達站運動時, vr>0, 回波載頻提高; 反之vr <0, 回波載頻降低。雷達只要能夠測量出回波信號的多卜勒頻移fd, 就可以確定目標與雷達站之間的相對速度。
4). 目標尺寸和形狀
如果雷達測量具有足夠高的分辨力, 就可以提供目標尺寸的測量。由于許多目標的尺寸在數十米量級, 因而分辨能力應為數米或更小。目前雷達的分辨力在距離維已能達到, 但在通常作用距離下切向距離(RQ)維的分辨力還遠達不到, 增加天線的實際孔徑來解決此問題是不現實的。然而當雷達和目標的各個部分有相對運動時, 就可以利用多卜勒頻率域的分辨力來獲得切向距離維的分辨力。例如,裝于飛機和宇宙飛船上的SAR(綜合孔徑)雷達, 與目標的相對運動是由雷達的運動產生的。 高分辨力雷達可以獲得目標在距離和切向距離方向的輪廓(雷達成像)
2、數據采集系統
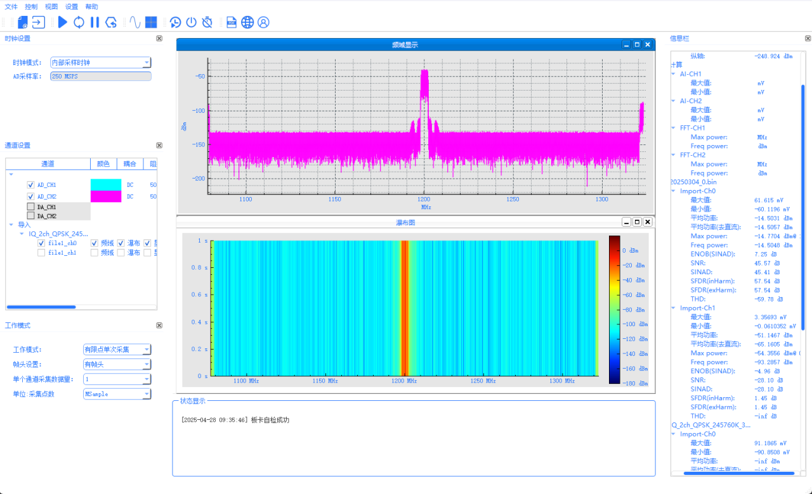
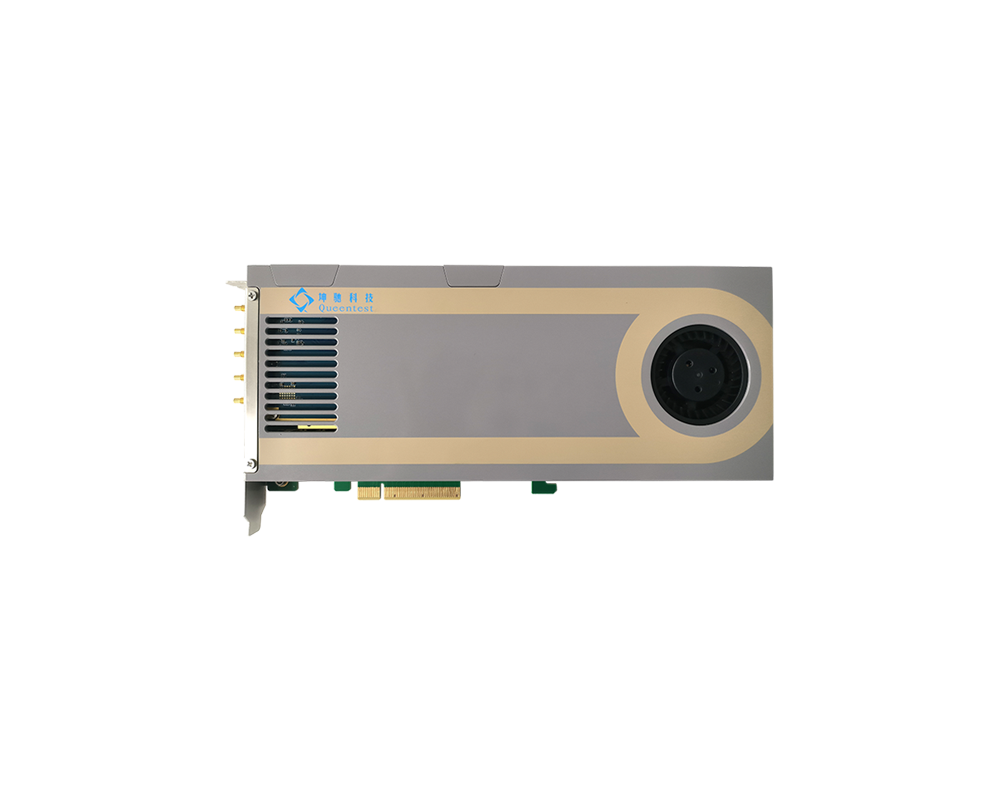
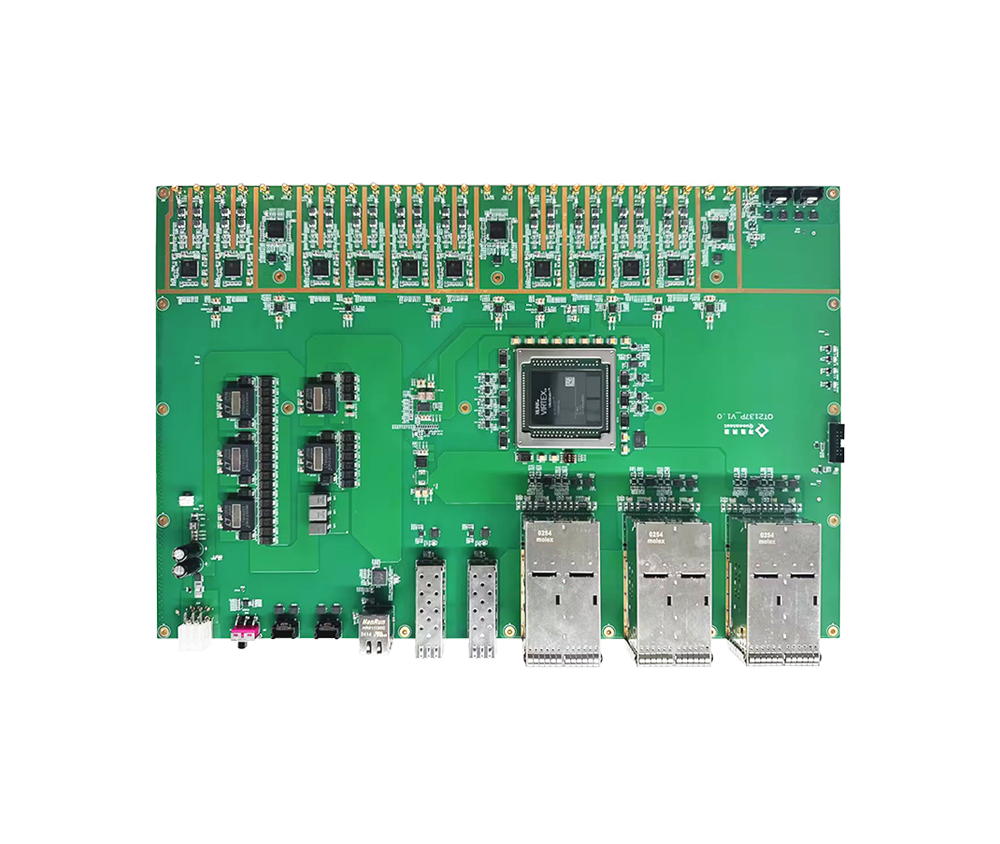
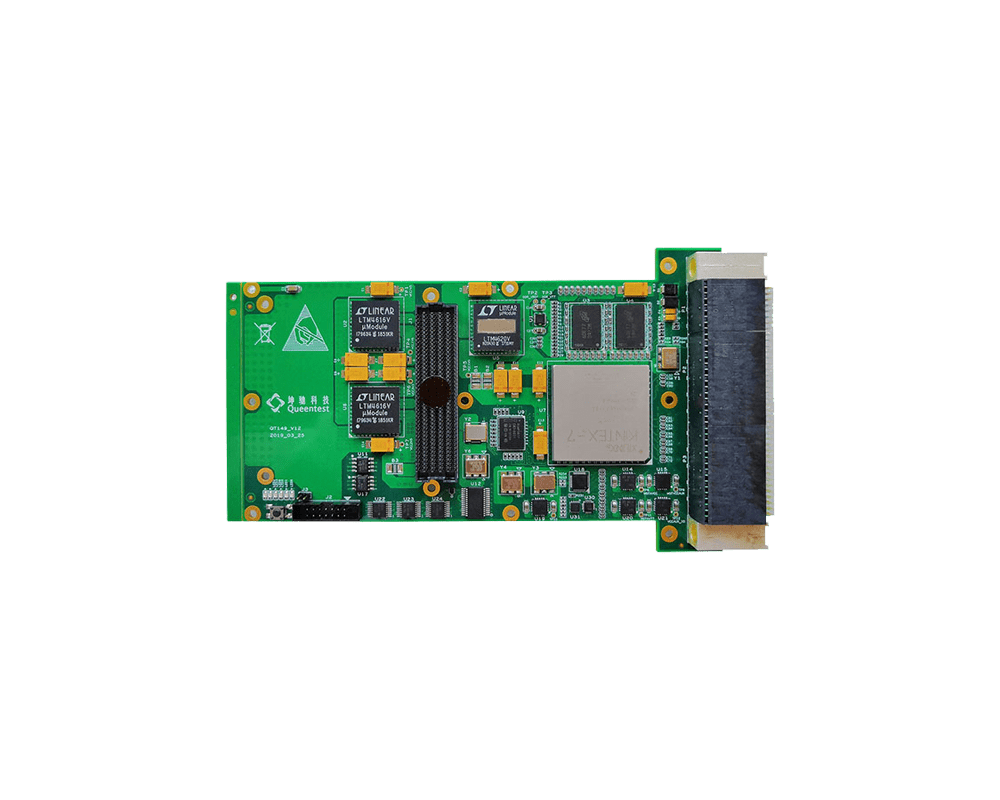
坤馳科技自主研發的QT1138是一款同時具備直流耦合程控放大器和支持寬帶通訊信號輸入的高速數據采集卡。這些特性使得QT1138成為激光雷達系統數字處理模塊中應用的理想工具。QT1138提供快速的PCI Express 2.0 x8數據傳輸接口,尤其適合于OEM應用。QT1138的采樣率在8通道工作工作模式下為250Msps/CH。模擬帶寬在交流輸入模式下高達300MHz,適合寬帶IF采樣應用;在直流程控輸入模式下高達100MHz,適合高速窄脈沖采集;開發套件允許用戶自定義實時處理算法。

系統性能
-
大支持8通道同步采集。
-
高250MSPS采樣率。
-
采用250MSPS單芯片雙通道ADC。
-
16bit 轉換精度。
-
支持AC、DC藕合方式;支持高頻脈沖信號輸入。
-
大板載4GB DDR3存儲器。
-
支持外部觸發輸入或輸出。
-
PCIe x8 Gen2數據傳輸接口,連續傳輸率3.0GB/s。
-
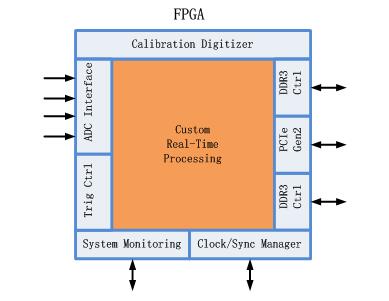
具有板載FPGA支持高速實時信號處理能力
-
FPGA支持用戶自定義邏輯開發。
-
快速PCIe總線實時傳輸采集數據
-
捕獲寬帶信號。
-
提供開放的QTex邏輯開發平臺
-
用戶可自定義開發FPGA
-
大容量板載存儲器
-
縮短開發時間,加快系統搭建速度
-
硬件可接受定制修改,如有此需求請聯系坤馳科技
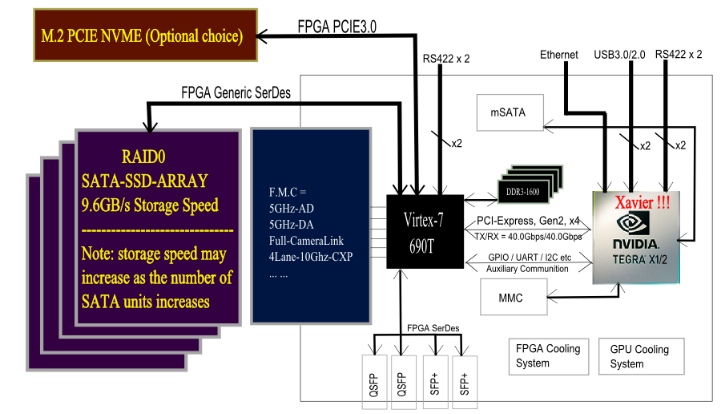
系統框圖:
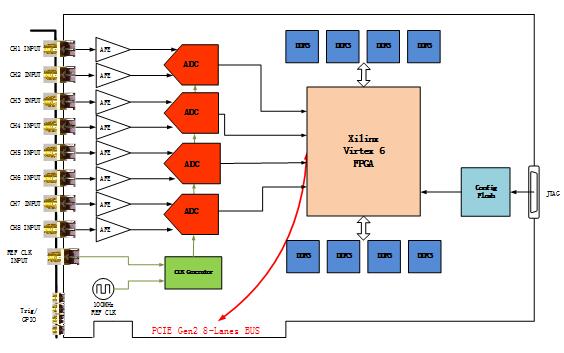
QT1138 通過PCI Express 8-lane 總線連接到計算機主機。每對Lane支持5.0Gbps(Gen2)的數據傳輸速度。QT1138采集卡采用PCI Express 16-lane 插卡的機械結構,使用其中8-lane物理連接。
QT1138使用PCI Express Gen2傳輸協議時,連續數據讀寫速度為3.0GB/s。對于一些較老的主板可能不支持PCI Express Gen2傳輸,QT1138 將自動降為PCI Express Gen1協議傳輸,此時連續數據讀寫速度為1.4GB/s。
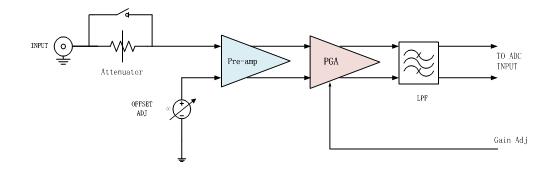
QT1138具有8個獨立的模擬信號輸入通道為用戶提供4種輸入方式選擇:
選擇:
標配:交流耦合
-OPT2:直流耦合
-
采用運算放大器直流耦合,單端輸入
-
輸入阻抗50Ω,輸入范圍2Vpp,軟件可配置
-
默認輸入帶寬DC~100MHz
QT1138板載128位寬DDR3存儲器用于緩存采集數據。DDR3讀寫數據率為1033MHz,能為用戶提供大128Gb/s的數據吞吐率,支持各種采集模式下的數據并發讀寫。
采集時鐘發生器
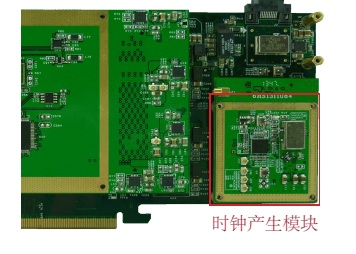
QT1138采用超低抖動時鐘信號產生模塊配合高穩定、低相位噪聲時鐘參考源來保證采集時鐘的性能。時鐘發生器采用獨立的屏蔽模塊,支持板載參考源、外部參考時鐘源以及同步接口參考時鐘輸入。
FPGA開發包:
QT1138支持用戶自定義邏輯開發,提供完整的FPGA邏輯工程,并提供Verilog-HDL的用戶邏輯接口源代碼。FPGA開發軟件使用XILINX ISE 14.5。
同時開放FPGA JTAG 調試接口。用戶可以使用XILINX USB-JTAG電纜和ChipScope 軟件進行邏輯在線調試。

3、應用領域